0. Introduction
- Tasks :
- Image Style Transfer : The task of migrating a style from one image (Style Image) to another (Content Image).
1. Image Style Transfer using CNNs (2016)
-
Introduction : Introduce a algorithm that can separate and recombine the image content and style of natural images.
-
Method : Extract feature maps $F_l$ from each input image $I_{content} $ and $I_{style}$ using pretrained networks at $l_{th}$ layer. Then, optimize $I_{output}$ to have similar contents with $I_{content}$ and similar style with $I_{style}$.
-
The content loss between $I_{content}$ and $I_{output}$ is calculated using Frobenius norm at $l_{th}$ layer :
$$L_{content} = \Sigma(F_{output} - F_{content})^2$$
-
The style loss between $I_{style}$ and $I_{output}$ at $l_{th}$ layer is calculated using Frob. norm and Gram matrix. The style loss is defined by weighted sum of $L_{style}^l$ :
$$L_{style} = \sum w_l \cdot L_{style}^l = \sum w_l (\sum(Gram(F_{output}) - Gram(F_{style})))$$
-
-
The final obejective function is defined as :
$$ L_{total} = \alpha L_{content} + \beta L_{style}$$
2. pix2pix (2016)
- Introduction : Conditional adversarial networks as a general-purpose solution to image-to-image translation problems.
- Method : The generator translate the input image (gray-scale) to target domain(color). And, the discrimator distinguishes between the converted image and real image.
$$ \text{GAN objective} = arg \min_G \max_D L_{cGAN}(G,D) + \lambda L_{L1}(G) $$
-
Adversarial Loss , the first term, is from cGAN loss :
$$ L_{cGAN}(G,D) = \mathbb{E}_y[log(D(x,y))] + \mathbb{E}_x[log(1-D(G(x)))]$$
-
Reconstruction Loss, the second term, is from traditional CNN based loss, which means pixel-wise differences between $y$ and $G(x)$.
$$ L_{L1}(G) = \mathbb{E}_{x,y}[| y-G(x) |] $$
-
Generator architecture is based on U-Net and discriminator architecture is based on PatchGAN(Markovian discrimator).
-
Generator is fed on real satellite image instead of latent vector and the pair of images are fed into the discriminator.
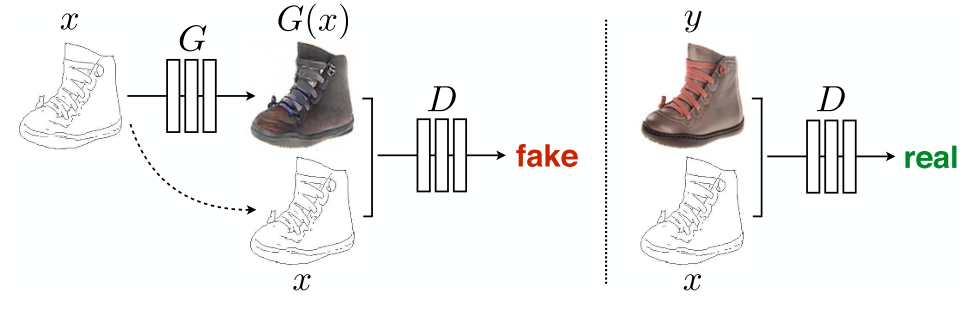
Figure. Overview of pix2pix Architecture
3. cycleGAN (2017)
-
Introduction : For many tasks, paired training data will not be available. Authors present an approach for learning to translate an image from a source domain $X$ to a target domain $Y$ in the absence of paired examples.
-
Method : using two discriminator (one for discriminating real $y$ and synthesized $G(x)$, the other for real $x$ and synthetic $F(y)$ ). And additional cycle consistency loss for preventing mode collapse that always return same output but very realistic.
$$ L(G,F,D_X,D_Y) = L_{GAN}(G,D_Y,X,Y) + L_{GAN}(F,D_X,Y,X) + \lambda L_{cyc}(G,F) $$
-
Adversarial Loss : For the mapping function $G: X \rightarrow Y $ and its discrimator $D_Y$, we express the objective as :
$$ L_{GAN} (G,D_Y,X,Y) = \mathbb{E}{y~p{data}(y)}[(logD_Y(y))] + \mathbb{E}{x~p{data}(x)}[(1-logD_Y(G(x)))] $$
$$ L_{GAN} (F,D_X,Y,X) = \mathbb{E}{x~p{data}(x)}[(logD_X(x))] + \mathbb{E}{y~p{data}(y)}[(1-logD_X(F(y)))] $$
-
Cycle Consistency Loss : Adversarial Losses alone cannot guarantee that the learned function can map an individual input $x_i$ to a desired output $y_i$. So authors argue that the learned mapping functions should be cycle-Consistent :
$$ \text{Forward cycle consistency} = \mathbb{E}{x~p{data}(x)}[| F(G(x))-x |_1 ] $$
$$ \text{Backward cycle consistency} = \mathbb{E}{y~p{data}(y)}[| G(F(y))-y | _ {1} ] $$
$$ L_{cyc} (G,F) = \text{forward} + \text{backward} $$
