3.0 Least Square
-
Inner Product : Given $ \mathbf{u,v} \in \mathbb{R}^n$, we can consider $ \mathbf{u,v} $ as $n \times 1$ matrices. The number $\mathbf{u^Tv}$ is called inner product or dot product, and it is written as $ \mathbf{u \cdot v} $.
-
Vector Norm : The length or magnitude of $\mathbf{v}$, can be calculated as $ \sqrt{ \mathbf{v} \cdot \mathbf{v} }$
-
$L_p$ Norm : $ \Vert \mathbf{x} \Vert_p = ( \Sigma_{i=1}^n \vert x_i \vert^p)^{1/p}$
-
Euclidean Norm : $L_2$ norm
-
Frobenius Norm : can be seen as an expansion of $L_2$ norm to apply to the matrix : $ \Vert A \Vert_F = \sqrt{\Sigma_{i=1}^m \Sigma_{j=1}^n} \vert a_{ij}\vert^2$
-
Unit Vector : A vector whose length is 1
-
Normalizing : Given a nonzero vector $\mathbf{v}$, if we divide it by its length, we obtain a unit vector.
-
Distance between vectors : dist($\mathbf{u,v}$) = norm($\mathbf{u-v}$) = $\Vert \mathbf{u-v} \Vert$
-
Inner Product and Angle Between Vectors : $\mathbf{u \cdot v} = \mathbf{\Vert u \Vert \Vert v \Vert} cos \theta $
-
Orthogonal Vectors : $\mathbf{u \cdot v} = \mathbf{\Vert u \Vert \Vert v \Vert} cos \theta = 0$. That is $ (\mathbf{u \perp v})$
3.1 Introduction to Least Squares Problem
-
Over-Determined : number of equations > number of variables (we have much more data examples), usually no solution exists
-
Motivation for Least Squares : Even if no solution exists, we want to approximately obtain the solution for an over-determined system.
- The example below shows how to determine which solution is better between $\begin{bmatrix} -0.12 \\ 16 \\ -9.5 \end{bmatrix}$ and $\begin{bmatrix} -0.4 \\ 20 \\ -20 \end{bmatrix}$ for given Over-Determined System.
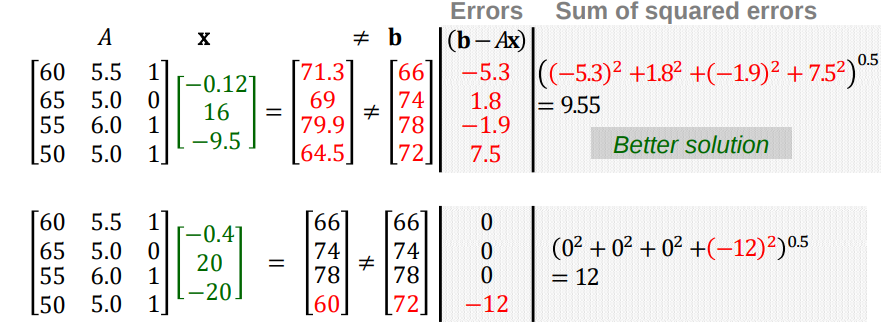
- Least Squares Problem : Given an over-determined system, $A \mathbf{x \simeq b}$, a least squares solution $\hat{x}$ is defined as
$$\mathbf{\hat{x}} = argmin_x | \mathbf{b} - A \mathbf{x} | $$
-
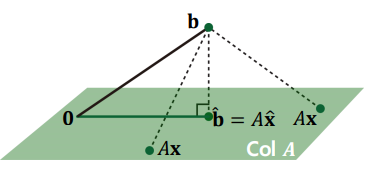
The most important aspect of the least-squares problem is that no matter what $\mathbf{x}$ we select, the vector $A \mathbf{x}$ will necessarily be in the column space Col $A$
-
Thus, we seek for $\mathbf{x}$ that makes $A \mathbf{x}$ as the closest point in Col $A$ to $\mathbf{b}$
3.2 Geometric Interpretation of Least squares
-
Consider $ \mathbf{\hat{x}} $ such that $ \hat{b} = A\mathbf{\hat{x}} $ is the closest point to $\mathbf{b}$ among all points in Column Space of $A$.
-
That is, $\mathbf{b}$ is closer to $\mathbf{\hat{b}}$ than to $A \mathbf{x}$ for any other $\mathbf{x}$.
-
To satisfy this, the vector $\mathbf{b}- A\mathbf{\hat{x}}$ should be orthogonal to Col $A$
-
This means $\mathbf{b} - A \mathbf{\hat{x}}$ should be orthogonal to any vector in Col A:
$$ \mathbf{b} - A\mathbf{\hat{x}} \perp (x_1\mathbf{a}_1 + …. x_p\mathbf{a}_n)$$
- Or equivalently,
$$ A^T(\mathbf{b} - A\hat{\mathbf{x}}) = 0$$
$\mathbf{b} - A \mathbf{\hat{x}} \perp \mathbf{a_1} \rightarrow >\mathbf{a}_1^T(\mathbf{b} - A \mathbf{\hat{x}})=0 $
$\mathbf{b} - A \mathbf{\hat{x}} \perp \mathbf{a_2} \rightarrow >\mathbf{a}_2^T(\mathbf{b} - A \mathbf{\hat{x}})=0 $ …
$\mathbf{b} - A \mathbf{\hat{x}} \perp \mathbf{a_m} \rightarrow >\mathbf{a}_m^T(\mathbf{b} - A \mathbf{\hat{x}})=0 $
- same with the equation below which is called a normal equation
$$A^T A\hat{\mathbf{x}}= A^T\mathbf{b}$$
3.3 Normal Equation
- given a least squares problem, $Ax \simeq \mathbf{b}$ , we obtain normal equation
$$A^T A\hat{\mathbf{x}}= A^T\mathbf{b}$$
- if $A^T A$ is invertible, then the solution is computed as
$$\hat{\mathbf{x}}= (A^T A)^{-1} A^T\mathbf{b} $$
-
If $A^T A$ is not invertible, the system has either no solution or infinitely many solutions. However, the solution always exist for this “normal” equation, and thus infinitely many solutions exist.
-
If and only if the columns of $A$ are linearly dependent, $A^TA $ is not invertible. However, $A^T A$ is usually invertible.
3.4 Orthogonal Projection
consider the orthogonal projection of $\mathbf{b}$ onto Col $A$ as
$$ \mathbf{\hat{b}} = f(\mathbf{b})= A{\mathbf{\hat{x}}} = A(A^TA)^{-1}A^T\mathbf{b} $$
-
Orthogonal set : A set of vectors {$ \mathbf{u_1, … u_p}$} in $\mathbb{R^n}$ if each pair of distinct vectors from the set is orthogonal. That is, if $\mathbf{u_i \cdot u_j}=0$ whenever $i \neq j$. So, All vectors in the orthogonal set are orthogonal to each other.
-
Orthonormal set : A set of vectors {$ \mathbf{u_1, … u_p}$} in $\mathbb{R^n}$ if it is an orthogonal set of unit vectors (norm=1) .
-
Orthogonal and Orthonormal Basis : Consider basis {$\mathbf{v_1, … , v_p}$} of a p-dimensional subspace $W $ in $\mathbb{R}^n$. We can make it as an orthogonal(or orthonormal) basis using Gram-Schmidt process.
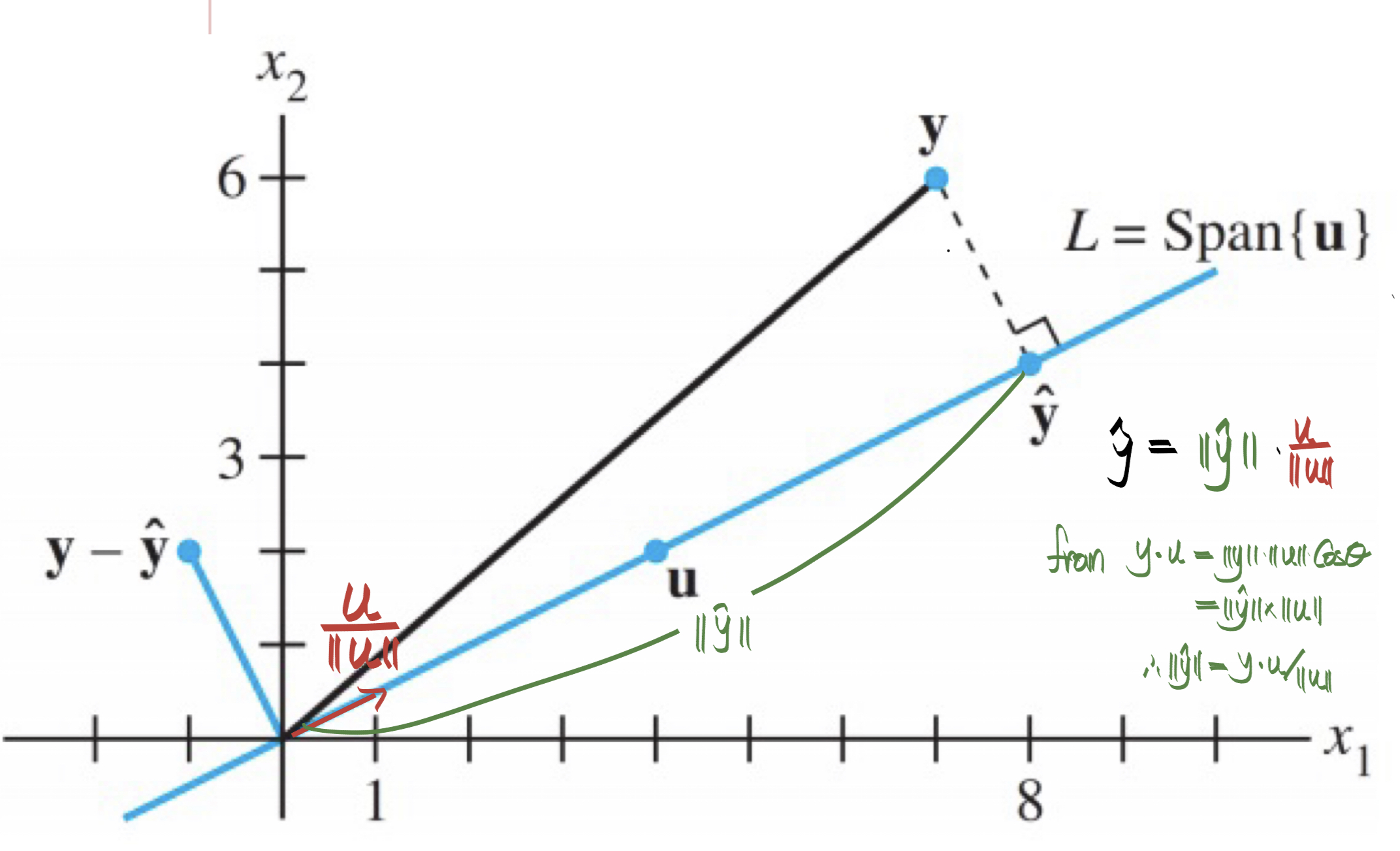
- Orthogonal Projection $\hat{\mathbf{y}}$ of $\mathbf{y}$ onto Line : Consider the orthogonal projection $\hat{\mathbf{y}}$ of $\mathbf{y}$ onto Line (1D subspace $L$). From the above picture, $\hat{\mathbf{y}}$ can be represented by multiplication of the norm (length) for $\hat{\mathbf{y}}$ (=$ | | \hat{\mathbf{y}} | |$) and the unit vector of $\mathbf{u}$ ( = $\mathbf{\frac{u}{||u||}} $ ). And we can calculate $\hat{\mathbf{y}}$ from the inner product of $\mathbf{y} \text{ and } \mathbf{u}$
$$ \hat{\mathbf{y}} = proj_L(\mathbf{y})$$
$$ = | | \hat{\mathbf{y}} | | \cdot \mathbf{\frac{u}{||u||}} = \mathbf{\frac{y \cdot u}{||u||}} \cdot \mathbf{\frac{u}{||u||}} $$
$$= \mathbf{\frac{y \cdot u}{u \cdot u}} \cdot \mathbf{u}, ( \because \mathbf{||u||}^2 = \mathbf{u \cdot u})$$
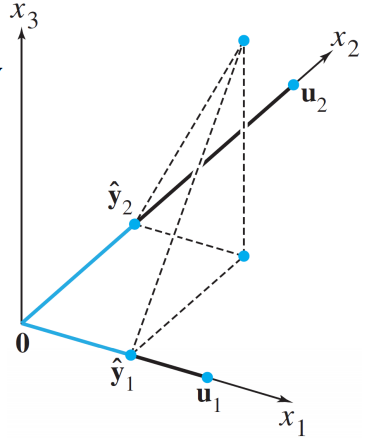
- Orthogonal Projection $\hat{\mathbf{y}}$ of $\mathbf{y}$ onto Plane : Consider the orthogonal projection $\hat{\mathbf{y}}$ of $\mathbf{y}$ onto two-dimensional subspace $W$
$$ W = span ( \mathbf{u_1, u_2} ) $$
$$ \hat{\mathbf{y}} = proj_L(\mathbf{y}) = \mathbf{\frac{y \cdot u_1}{u_1 \cdot u_1}} \cdot \mathbf{u_1} +\mathbf{\frac{y \cdot u_2}{u_2 \cdot u_2}} \cdot \mathbf{u_2} $$
- Orthogonal Projection as a Linear Transformation : Consider a transformation of orthogonal projection $\mathbf{\hat{b}}$ of $\mathbf{b}$. If orthonormal basis {$\mathbf{u_1, u_2}$} of a subspace $W$ is given, both $\mathbf{u_1, u_2}$ are unit vector and we can get following equation :
$$ \mathbf{\hat{b}} = f(\mathbf{b}) = \mathbf{ (b \cdot u_1)u_1 + (b \cdot u_2 )u_2 } $$
$$ \mathbf{ = (u_1^Tb)u_1 + (u_2^T b)u_2 = (u_1u_1^T + u_2 u_2^T)b = \begin{bmatrix} u_1^T \\ u_2^T \end{bmatrix} \begin{bmatrix} u_1 \ u_2 \end{bmatrix} = UU^T b } $$
3.5 Gram-Schmidt Orthonomalization
- If two (or more) vectors are linearly independent, these vectors create an vector space. And we want to represent this vector space using a orthogonal (or orthonormal) set in many cases.
- In the previous chapter, we’ve learned orthogonal projection of one vector to the other.
- From this we can represent a given vector space (linearly independent vector set) with a orthogonal vector set : Gram-Schmidt
Example: Let $W=span( \mathbf{x_1, x_2})$, where $\mathbf{x_1} = \begin{bmatrix} 3\\ 6\\ 0\end{bmatrix}$, $\mathbf{x_2} = \begin{bmatrix} 1\\ 2\\ 2\end{bmatrix}$. Construct an orthogonal basis {$\mathbf{v_1, v_2}$} for $W$
Solution:
- Let $\mathbf{v_1} = \mathbf{x_1}$. And, let $\mathbf{v_2}$ the component of $\mathbf{x_2}$ is orthogonal to $\mathbf{x_1}$, i.e. $$ \mathbf{v_2 = x_2 - proj_{v1}(x2) = x_2 - \frac{x_2 \cdot x_1}{x_1 \cdot x_1} x_1 }= \begin{bmatrix} 1 \\ 2 \\ 2 \end{bmatrix} - \frac{15}{45}\begin{bmatrix} 3 \\ 6 \\ 0 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \\ 2 \end{bmatrix} $$
- Now, we get orthogonal basis for $W$. That is, $$\mathbf{v_1} = \begin{bmatrix} 3\\ 6\\ 0\end{bmatrix}, \mathbf{v_2} = \begin{bmatrix} 0\\ 0\\ 2\end{bmatrix}$$
- We can get the orthonormal set $\mathbf{(u_1,u_2)}$ of these vectors by dividing the norm of each vectors $$\mathbf{u_1} = \frac{1}{\sqrt{45}} \begin{bmatrix} 3\\ 6\\ 0\end{bmatrix}, \mathbf{u_2} = \begin{bmatrix} 0\\ 0\\ 1 \end{bmatrix}$$
3.6 QR Factorization (QR Decomposition)
- QR Decomposition : is a decomposition of a matrix $A$ into a orthogonal matrix $Q$ (with Gram-Schmidt) and upper triangular matrix $R$ .
- For a given lineary independent matrix, we can find orthogonal basis of the vector space using Gram-Schumidt.
- There should be another matrix that undo the above orthogonalization tranfrom
- Here, the orthogonalized matrix is represented as $Q$ and the ‘un-doing’ matrix is represented as $R$.
$$A \rightarrow \text{Gram-Schumidt} \rightarrow Q \rightarrow \times R \rightarrow A $$
Example : Consider the decomposition of linearly independeny matrix $A = \begin{bmatrix} 12&-51&4\\ 6&167 &-68\\ -4&24&-41\end{bmatrix}$
Solution :
Then, we can calculate $Q$ by means of Gram-Schmidt as follows:
$$U = [\mathbf{u1, u2, u3}] = \begin{bmatrix} 12&-69&-58/5\\ 6&158 &-6/5\\ -4&30&-33\end{bmatrix}$$
$$ Q = [\mathbf{\frac{u_1}{|u_1|}, \frac{u_2}{|u_2|}, \frac{u_3}{|u_3|}}] = \begin{bmatrix} 6/7&-69/175&-58/175\\ 3/7&158/175 &-6/175\\ -2/7&30/175&-33/35\end{bmatrix} $$
Thus, we have
$$R = Q^TA = \begin{bmatrix} 14&21&-14\\ 0&175 &-70\\ 0&0&35\end{bmatrix}$$
Summary
-
Least Square Problem : No solution exists for the linear equation $Ax=b$
=> Approximate the solution $\hat{x}$ minimizes $ b - A \hat{x}$.
=> And $ b - A \hat{x}$ should be orthogonal to Column Space => $ A^T(\mathbf{b} - A\hat{\mathbf{x}}) = 0$
=> From this equation, We get the normal equation $A^T A\hat{\mathbf{x}}= A^T\mathbf{b}$
=> And if $A^T A$ is invertible, the solution $\hat{\mathbf{x}}= (A^T A)^{-1}A^T\mathbf{b}$
=> On the other view, $\hat{b}$ is the orthogonal projection of $b$
=> Now, we can find orthogonal projection of a vector
=> we can find orthogonal vector set using given linearly independ vectors (in that vector space)